Getting Started
-
4. Inizializing ROS
And to Initialize Rosedep Tool
This Utility is Required by some Core Components and possibly it make easy to Search for Dependencies on Source Compilation builds.
To Setup it fire:sudo rosdep init
Again to Update it:
rosdep update
-
5. Setting Up Path
Finally, to Set Up Environment Variables
So modify the User’s Bash configuration with:echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
To Reload it simply:
bash
-
6. Testing ROS
Now it’s Time to Test ROS Setup
On a Shell Window let the Talker Publishing Messages of “Hello World!”:ros2 run demo_nodes_cpp talker
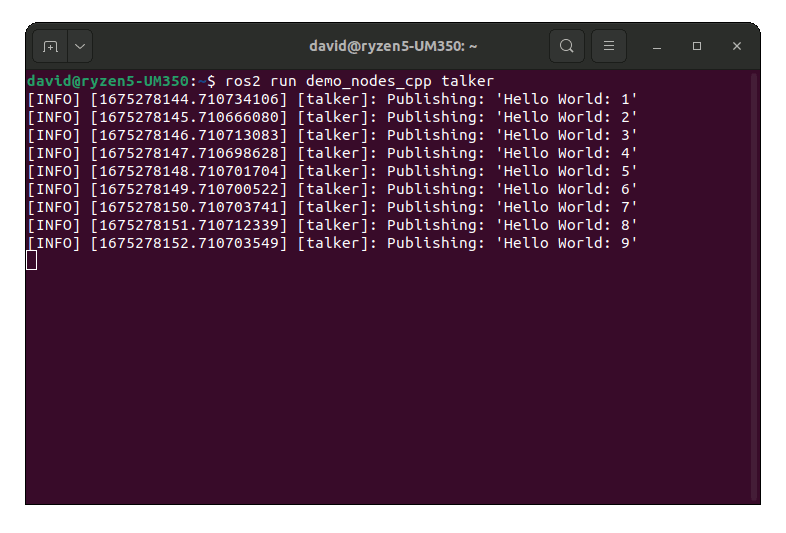
Then Open a New One and see if the Listener is Hearing:
ros2 run demo_nodes_py listener
You should see the Talker saying that it’s Publishing messages and the Listener saying I heard those messages.
This verifies both the C++ and Python APIs are working properly.
Hooray! -
7. ROS Getting Started Guide
Getting Started with ROS on EndeavourOS GNU/Linux
So Now I’m truly Happy if My Guide could Help you to Quickstart with ROS in EndeavourOS Linux!
Contents