Getting Started
-
5. Setting Up Path
Finally, to Set Up Environment Variables
So modify the User’s Bash configuration with:echo "source /opt/ros/rolling/setup.bash" >> ~/.bashrc
To Reload it simply:
bash
-
6. Testing ROS
Now it’s Time to Test ROS Setup
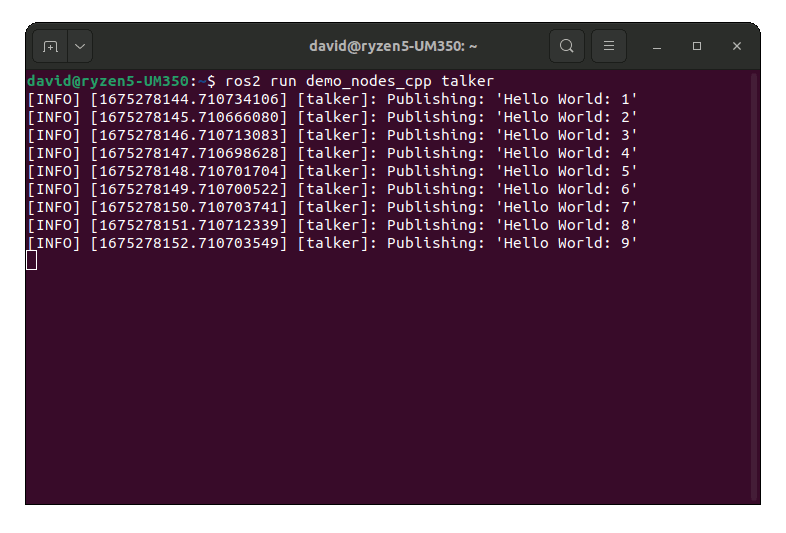
On a Shell Window let the Talker Publishing Messages of “Hello World!”:ros2 run demo_nodes_cpp talker
Then Open a New One and see if the Listener is Hearing:
ros2 run demo_nodes_py listener
You should see the Talker saying that it’s Publishing messages and the Listener saying I heard those messages.
This verifies both the C++ and Python APIs are working properly.
Hooray! -
7. ROS Getting Started Guide
Getting Started with ROS on Ubuntu GNU/Linux
So Now I’m truly Happy if My Guide could Help you to Quickstart with ROS on Ubuntu 22.04!
Contents